Safety-Critical HMI Sistemlerinde Fieldbus Entegrasyonu

ANSYS SCADE Display platformunda tasarlanan HMI ekranlarının, sahadaki HIMA HiMatrix F35 güvenlik PLC’leri ile Modbus TCP/IP üzerinden haberleşmesini sağlayan C99 tabanlı standart bir middleware.
Kapsam: SCADE’in kapalı döngü yapısı ile kontrol katmanı arasında veri alışverişini sağlamak amacıyla geliştirilmiş, zero-copy prensibiyle çalışan bir entegrasyon uygulaması.
Proje Künyesi
|
Parametre |
Değer |
|---|---|
|
Kategori |
Sistem Entegrasyonu |
|
Teslimat Tipi |
Embedded Middleware |
|
Durum |
Proof of Concept / Akademik Bildiri Yayınlandı |
|
Rol |
Embedded Systems Developer |
|
Ölçek / Kapsam |
Lokal Haberleşme (4 Hat Kesimi, 6 Sinyal, 1 Makas) |
Mevcut Durum ve Sorun
Bağlam: İTÜ Raylı Sistemler Laboratuvarı’ndaki anklaşman simülasyon sisteminin endüstriyel standartlara uygun HMI yapısına taşınması. Kritik Sorunlar: SCADE Display kapalı sistem mimarisi nedeniyle HIMA PLC’ler ile Modbus haberleşmesi kurulamaması ve dinamik saha konfigürasyonu eksikliği.
|
Bileşen |
Durum / Gereksinim |
|---|---|
|
HMI Platformu |
SCADE Display içerisinde yerleşik (native) Modbus arayüzünün bulunmaması |
|
Kontrol Katmanı |
HIMA HiMatrix F35 PLC’ler ile Modbus TCP/IP üzerinden haberleşme zorunluluğu |
|
Saha Konfigürasyonu |
Her istasyon için değişen IP/port ve register haritalarının (runtime) yönetimi |
|
Sistem Boyutu |
4 hat kesimi, 6 sinyal, 1 makas ve 4 rotadan oluşan lokal anklaşman devresi |
Çözüm Mimarisi ve Aksiyon
Mimari Yaklaşım
💡 Mimari Kısıt Değerlendirmesi: SCADE platformu
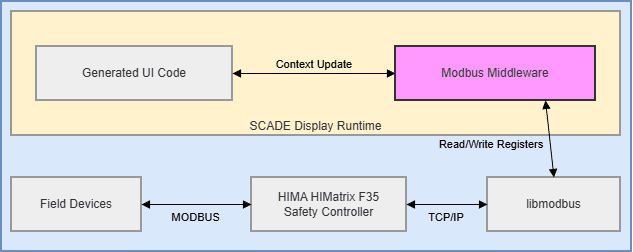
DO-178C / EN 50128sertifikasyon bütünlüğünü korumak adına tüm asenkron dış ağ operasyonlarından arındırılmış “kapalı bir sistem” tasarım felsefesine sahiptir. Bu nedenle laboratuvardaki fiziksel PLC entegrasyonu için doğrudan dışarıdan asenkron çalışan bağımsız bir middleware katmanının geliştirilmesi zorunlu olmuştur.
SCADE’in ürettiği kod ile libmodbus arasında bir C99 middleware wrapper katmanı tasarlandı:
Haberleşme Akışı
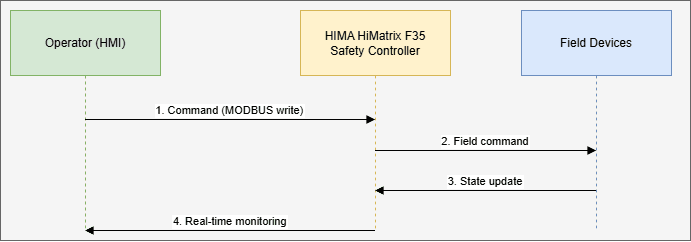
Uygulanan Metodoloji
- Zero-Copy Entegrasyon: SCADE ana döngüsüne doğrudan hook yaparak kopya maliyetini ortadan kaldırdık.
- Dinamik Konfigürasyon: Saha kurulumunda yeniden derleme gerektirmemek için 3 bölümlü INI dosyası kullandık.
Güvenlik mekanizması: Eksik veya bozuk konfigürasyon dosyası algılandığında, sistem varsayılan ayarları (localhost bağlantısı) otomatik oluşturur ve kaydeder.
- Auto-Reconnection: Endüstriyel ortamlarda bağlantı kopmaları kaçınılmazdır.
- Değişim Algılama (Change Detection): Ağ trafiğini optimize etmek için batch read ve selective write stratejisi uygulandı.
Mimari Karar: HMI donanımlarında fiziksel olarak eşzamanlı çoklu komut işleme durumu kısıtlı olduğundan, çıkışlar sıralı bir döngüde değerlendirilir. Bu yapısal tercih, gereksiz fieldbus trafiğini (network flooding) engeller.
- Thread-Safe Logging: Kritik sistemlerde her olay kaydedilmelidir.
Anklaşman Kapsamı
|
Bileşen |
Adet |
Detay |
|---|---|---|
|
Hat Kesimi (TC) |
4 |
TC01–TC04 |
|
Sinyal (SN) |
6 |
Giriş + çıkış sinyalleri |
|
Makas (SW) |
1 |
Normal / Reverse |
|
Rota (RT) |
4 |
RT01–RT04 kombinasyonları |
Örnek rota: RT01: SN01E → TC01 → TC04 → TC02 → SN02E (Makas: Normal)
Emniyet Kuralı: Kritik tasarım ilkeleri gereği, sistem tarafından açıkça talep edilmeyen tüm sinyaller varsayılan olarak kısıtlayıcı duruma (kırmızı) geçecek şekilde kurgulanmıştır.
Sonuçlar ve Operasyonel Kazanımlar
Sayısal Kazanım: (PoC düzeyinde laboratuvar testlerinde elde edilen potansiyel değerler)
|
Metrik |
Değer / Durum |
|---|---|
|
Döngü Süresi |
~8ms ortalama gecikme |
|
Bağlantı Yönetimi |
Hata durumunda otomatik yeniden bağlanma (auto-reconnect) |
|
Konfigürasyon |
Parametrik yapı sayesinde derlemeden bağımsız devreye alma |
|
Ağ Trafiği |
Change detection algoritmaları ile yalnızca değişen register’ların aktarımı |
|
Doğrulama |
HIMA HiMatrix F35 PLC (SILworX) ve fiziksel test yatağı üzerinde doğrulama |
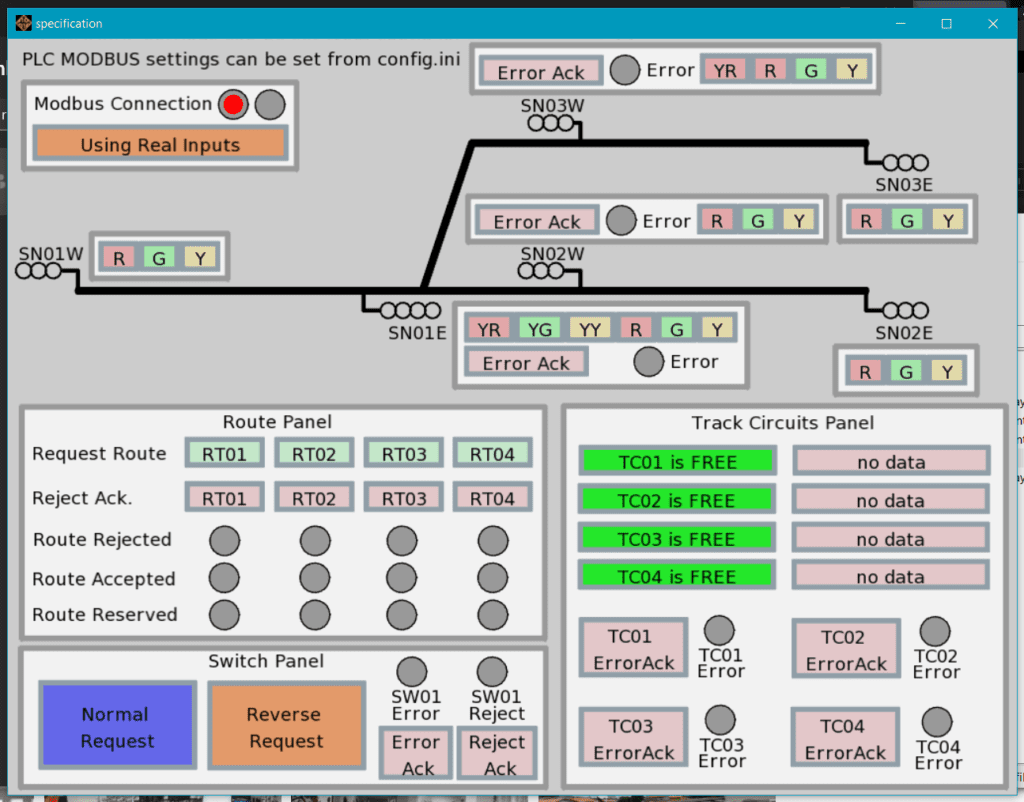
Proje Görselleri


İlgili Bağlantılar
📂 Kaynak Kod: Github/ansys-scade-modbus-integration-middleware
🔗 TOK 2025 Bildiriyi İndir: SCADE Modbus Bildiri (PDF)
Yazarlar: Dora Demir¹, İbrahim Can Kolotoğlu², Muhammet Işık², Serhat Boynukalın³, Mehmet Turan Söylemez²
¹ İTÜ Elektronik ve Haberleşme Müh. | ² İTÜ Kontrol ve Otomasyon Müh. | ³ İTÜ Lisansüstü Eğitim Enstitüsü
Bu çalışma, İTÜ EEF Raylı Sistemler Laboratuvarı’nda gerçekleştirilmiş ve Türkiye Otomatik Kontrol 2025 (TOK 2025) konferansında yayınlanmıştır.