Fieldbus Integration in Safety-Critical HMI Systems

A standard C99-based middleware designed on the ANSYS SCADE Display platform, enabling HMI screens to communicate with field-level HIMA HiMatrix F35 safety PLCs via Modbus TCP/IP.
Scope: An integration application operating on the zero-copy principle, developed to establish data exchange between SCADE’s closed-loop structure and the control layer.
Project Portfolio
|
Parameter |
Value |
|---|---|
|
Category |
System Integration |
|
Delivery Type |
Embedded Middleware |
|
Status |
Proof of Concept / Academic Paper Published |
|
Role |
Embedded Systems Developer |
|
Scale / Scope |
Local Communication (4 Track Circuits, 6 Signals, 1 Switch) |
Current Situation and Problem
Context: The necessity to migrate the interlocking simulation system (4 tracks, 6 signals, 1 switch) at the ITU Railway Systems Laboratory to a SCADE Display-supported HMI architecture compliant with industrial and certifiable standards. Critical Issues: The absence of a native Modbus interface within SCADE Display and the platform’s closed-network design. The inability of the HMI interface to communicate directly with actual field controllers (HIMA HiMatrix F35), and the lack of dynamic field configuration for IP/port maps.
|
Component |
Status / Requirement |
|---|---|
|
HMI Platform |
Lack of a native Modbus interface within SCADE Display |
|
Control Layer |
Mandatory communication with HIMA HiMatrix F35 PLCs via Modbus TCP/IP |
|
Field Configuration |
Runtime management of varying IP/port and register maps per station |
|
System Size |
Local interlocking circuit comprising 4 track circuits, 6 signals, 1 switch, and 4 routes |
Solution Architecture and Execution
Architectural Approach
💡 Architectural Constraint Assessment: To preserve
DO-178C / EN 50128certification integrity, the SCADE platform features a “closed system” design philosophy stripped of all asynchronous external network operations. Consequently, for physical PLC integration in the laboratory, developing an independent, externally operating asynchronous middleware layer became mandatory.
A C99 middleware wrapper layer was designed between SCADE’s generated code and the libmodbus library:
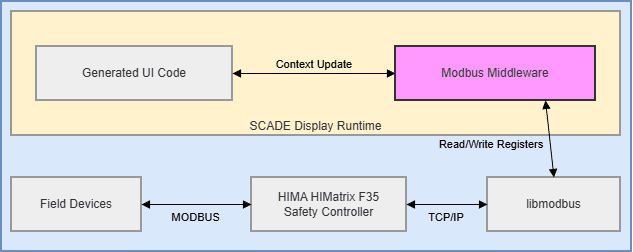
Communication Flow
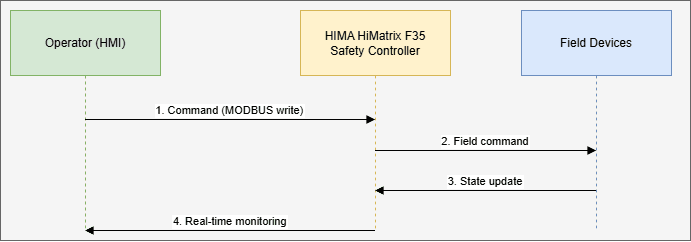
Applied Methodology
- Zero-Copy Integration: Copy overhead was eliminated by hooking directly into the SCADE main loop.
- Dynamic Configuration: A 3-region INI file was utilized to prevent recompilation requirements during field deployment.
Security mechanism: Upon detecting a missing or corrupted configuration file, the system automatically creates and saves default settings (localhost connection).
- Auto-Reconnection: Connection drops in industrial environments are inevitable; an autonomous auto-reconnect cycle was activated.
- Change Detection: A batch read and selective write strategy was implemented to optimize network traffic.
Architectural Decision: Since HMI hardware’s capability for simultaneous physical command processing is limited, outputs are evaluated in a sequential loop. This structural preference prevents unnecessary fieldbus traffic (network flooding).
- Thread-Safe Logging: Every event in critical systems must be logged securely.
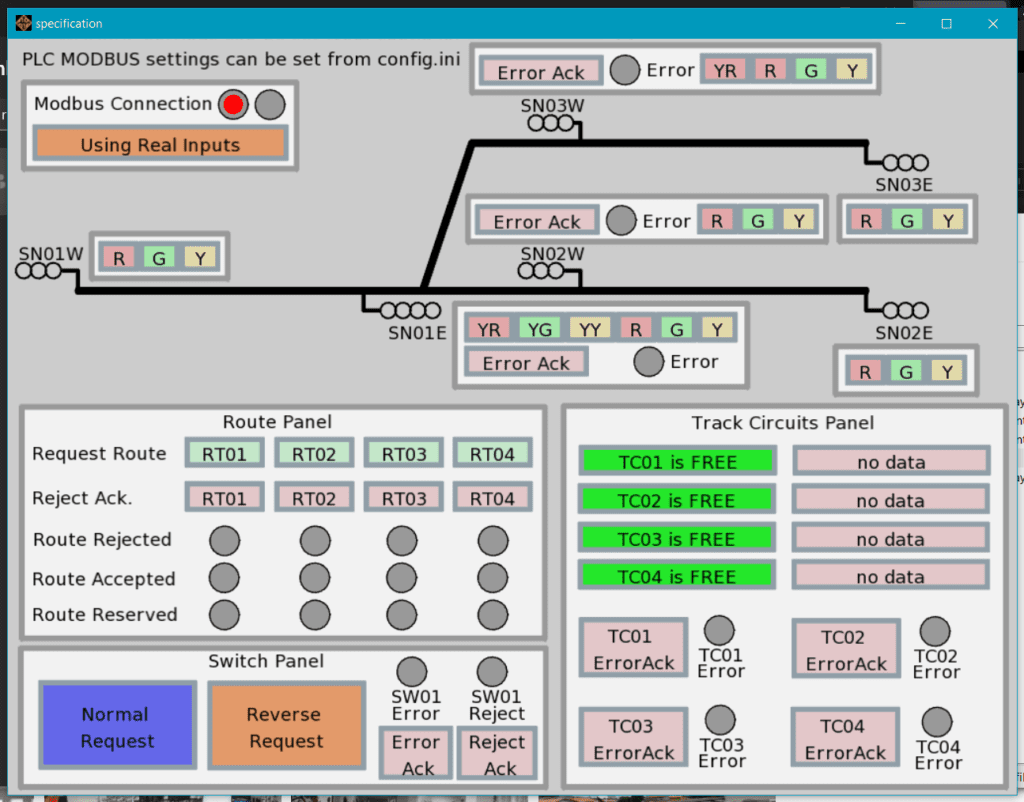
Interlocking Scope
|
Component |
Quantity |
Details |
|---|---|---|
|
Track Circuit (TC) |
4 |
TC01–TC04 |
|
Signal (SN) |
6 |
Input + output signals |
|
Switch (SW) |
1 |
Normal / Reverse |
|
Route (RT) |
4 |
RT01–RT04 combinations |
Example route: RT01: SN01E → TC01 → TC04 → TC02 → SN02E (Switch: Normal)
Safety Rule: Based on critical design principles, all signals not explicitly demanded by the system are configured to default to a restrictive state (red).
Results and Operational Takeaways
Quantitative Gain: (Potential values obtained during laboratory PoC tests)
|
Metric |
Value / Status |
|---|---|
|
Cycle Time |
~8ms average latency |
|
Connection Mgmt |
Automatic reconnection upon failure (auto-reconnect) |
|
Configuration |
Compilation-independent commissioning via parametric structure |
|
Network Traffic |
Transmission of solely changed registers via change detection algorithms |
|
Validation |
Validated on HIMA HiMatrix F35 PLC (SILworX) and physical testbed |
Project Visuals


Related Links
📂 Source Code: Github/ansys-scade-modbus-integration-middleware
🔗 Download TOK 2025 Paper: SCADE Modbus Paper Turkish (PDF)
Authors: Dora Demir¹, İbrahim Can Kolotoğlu², Muhammet Işık², Serhat Boynukalın³, Mehmet Turan Söylemez²
¹ ITU Electronics and Communication Eng. | ² ITU Control and Automation Eng. | ³ ITU Graduate School
This work was conducted at the ITU EEF Railway Systems Laboratory and published at the Turkish Automatic Control 2025 (TOK 2025) conference.